





传统的手工抛光打磨存在劳动强度高、抛光效果不稳定、难以处理复杂形状、安全风险和无法满足高质量要求等痛点。因此,应用工业机器人进行自动化表面精加工的技术随之崛起。
然而,打磨抛光领域一直难以实现全面的自动化,特别是需要进行精细打磨或对打磨后表面有较高要求的工件,如医疗器械设备等。
目前,自动化打磨方案广泛采用了“被动柔顺”技术,指在机器人的末端添加柔性装置,以增加工具与工件之间的接触性和适应性。这些柔性装置包括弹簧、阻尼器、可调解气阀等,它们能够使工具在打磨抛光过程中更好地适应工件表面的形状和特性。
但是在工艺性要求更高的场景中,“被动柔顺”技术方案的弊端就显现出来了:
01 限制性:
设置和调整柔性装置需要考虑工件的形状和特性,这需要更多时间和努力来进行定制和适配;尤其是在面对具有细节、曲面变化或非均匀形状的工件,柔性装置的适应性会受到限制。
02 不可控性:
柔性装置的性能和适应性可能存在差异,这可能导致不同工件或不同工件区域的打磨效果有所不同;此外,由于机器人的运动控制和定位误差,可能出现柔性装置与工件接触不良等问题,影响打磨效果。
03 精度受限:
柔性装置可能引入一些不确定因素,从而影响最终的打磨抛光精度;尤其是在对高精度表面要求更高的工件上,由于施加的压力相对较小,使用柔性装置在打磨时往往会引发不均匀的问题,出现缺陷、毛刺、划痕,仍需要手工补充处理。
总而言之,虽然“被动柔顺”技术能够在一定程度上提高了机器人打磨系统的稳定性和精确性,但并非解决精细抛光打磨场景的最佳自动化方案。
在此背景下,宏集尝试采用七轴都带有扭矩传感器的柔性机械臂,为表面加工技术带来新的解决方案。
由于在七轴都安装了扭矩传感器,宏集机械臂具有类人类触觉,能够在运动中实现柔性控制和精准的力反馈,使客户不需额外添加末端柔性装置,就能以机器替代人工实现抛光打磨过程。
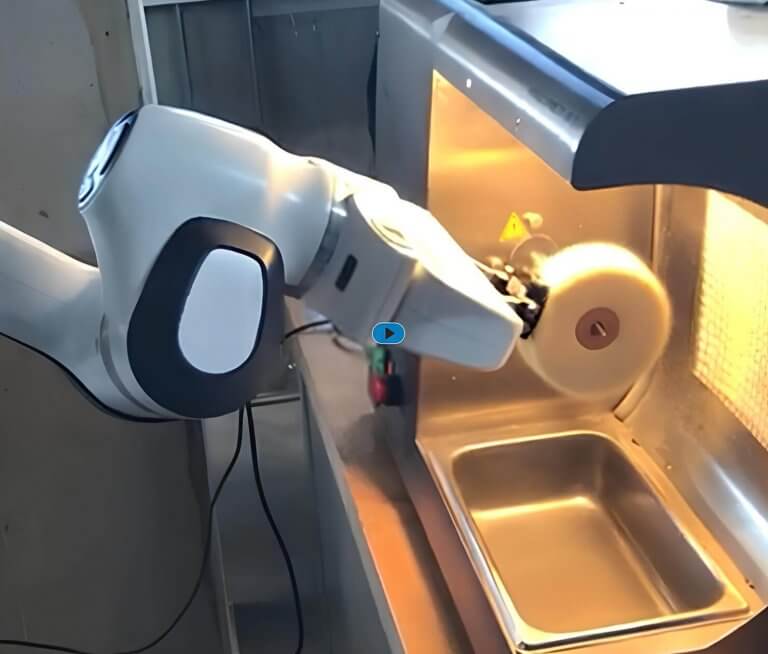
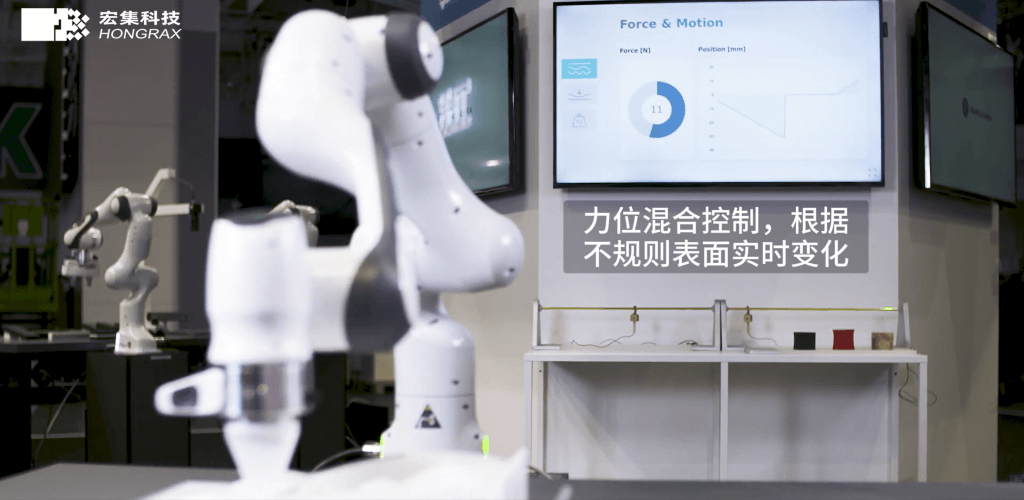
在抛光打磨的过程中,宏集七轴柔性机械臂采用力位混合控制策略,同时控制关节的力矩和角度,实现柔性和精确性的平衡。这一控制策略,让宏集机械臂得以在按照预设的轨迹运行时,主动保持对磨具和工件之间恒定可控的施压,从而保证一致的打磨效果。
此外,客户只需通过直观的人机界面,在机械臂编程界面的打磨应用APP中,导入产品数模,选取特征点并进行拖拽,宏集机械臂就会根据点位自动生成路径,从而大大压缩了时间成本,提高了打磨实现的效率。
总而言之,宏集推出七轴都带有扭矩传感器的柔性机械臂,通过类人类触觉、力位控制策略与直观易用的打磨app,实现均匀一致的打磨效果,打破“被动柔顺”方案的不可控性与精度限制,使表面精加工技术效率和精度大幅提升。
宏集科技(上海)有限公司是广州虹科电子科技有限公司旗下的子公司。依托于总公司在工业领域多年的技术经验和客户积累,宏集科技为国内外数字化和智能化工厂提供面向工业现场控制级、边缘级、过程监控级和云端的解决方案,致力于帮助各行业推动数字化转型升级。我们与全球顶尖工业技术团队开展深度合作,提供包括物联网HMI、网关、工业树莓派、SCADA解决方案、边缘计算解决方案、OPC通信方案、MQTT通信方案、预测性维护方案、传感器方案等在内的多种工业自动化解决方案。我们已为石油、化工、海洋海事、医药、食品、包装、汽车、钢铁等多个行业超过300家用户提供了从硬件到软件的不同方案,广受客户的好评与信任。
选择宏集科技,就是选择专业和可靠。我们将为您提供一站式解决方案、个性化定制服务以及专业可靠的售后技术支持,省时高效,助力企业实现自动化升级与数字化转型。
仅需30s填写以下信息,我们将有专人联系您。