














线性伺服执行器是一种用于产生直线运动的电动执行器。它结合了步进电机的定位精度和直线导轨的平滑运动特性,能够精确地控制位置、速度和力。线性伺服执行器通常由电机、传感器、控制器和驱动器组成,提供高精度和高速度的直线运动控制。
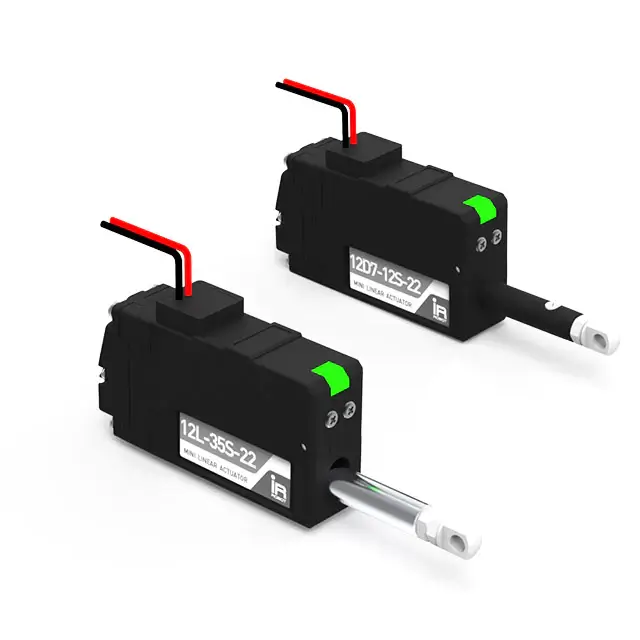
宏集IR Robot,重新定义微型线性伺服致动技术,基于长期积累的机器人设计与运动控制经验,为自动化设备与精密控制应用提供稳定、可控、可反馈的线性驱动解决方案。不同于传统开环推杆或简单电动执行器,宏集IR ROBOT的线性伺服执行器采用伺服级控制架构,支持位置、速度与失速力的控制,能够在复杂工况下实现精准、可重复的线性运动。
支持位置、电流和速度控制,27/40/53/90毫米行程
支持位置、电流和速度控制,27/37/50/87毫米行程
| 产品系列 | 17Lf伺服系列 | 12Lf伺服系列 |
|---|---|---|
|
直流电机 |
无芯直流电机(直径17毫米) |
无芯直流电机(直径12毫米) |
|
输入电压 |
12V |
12V |
|
行程(毫米) |
27(30*) 37(40*) 50(53*) 87(90*) |
27(30*) 40 53 90 |
|
电流控制 |
目标电流(易失)/ 电流限制(非易失)参数: 可调范围 200 mA ~ 1600 mA(默认 800 mA) |
目标电流(易失)/ 电流限制(非易失)参数: 可调范围 200 mA ~ 1600 mA(默认 800 mA) |
|
速度控制 |
目标速度(易失)/ 速度限制(非易失)参数: 以 1000 步分辨率进行控制(默认 1000,即最大速度) |
目标速度(易失)/ 速度限制(非易失)参数: 以 1024 步分辨率进行控制(默认 1024,即最大速度) |
|
通信方式 |
RS-485(UART,后续将增加 PWM、UART) |
PWM / TTL 或 RS-485 |
|
通讯协议 |
MODBUS RTU(不支持 IR Open Protocol) |
IR Robot Open Protocol(默认)或 MODBUS RTU(可切换) |
|
数据反馈 |
位置、电流、电压、电机运行速率、过载值 |
位置、电流、电压、电机运行速率 |
|
Expoansion I/O 端口 |
4个端口 (功能:开关、JOG、动作启用、强制关闭、暂停、停止、重启、报警结束) |
无 |
(*)当在 Total Manager 软件中更改 Long Stroke Limit(长行程限制) 设置时的最大行程长度
输送机的自动宽度调节
按钮/滑动开关测试
气缸或电磁铁的高性能替代方案
输送线宽度自动调节
自动对位控制(上下 / 左右)
自动点胶 / 涂布(润滑脂、胶水等)
精密平台(Stage)运动控制
冲孔 / 孔位检测
深度 / 厚度检测(基于位置反馈)
按钮 / 开关 / 操纵杆 / 触控面板驱动控制
注射器/移液器控制
医疗器械(如 HIFU、高频射频 / 点阵射频等)
注射器 / 移液器控制(如水光枪、填充注射设备等)
摄像头或激光对焦 / 区域调节
精密给料 / 点胶控制
医疗 3D 打印设备
假肢手 / 康复训练设备
无人机收线器
机器人手/夹爪
自动对准和夹紧
通用应用
阀门控制
锁紧 / 夹持
伸出 / 回缩控制
拉动 / 推动 / 压缩控制
开 / 关(On-Off)控制
方向 / 角度(倾斜)控制
距离 / 间隙调节
制动 / 换挡控制
是的,可以,因为mightyZAP支持与传统遥控器相同的PWM信号。但是,如果您需要关闭“过载保护”功能,请注意,该功能出厂时默认开启,以防止遥控器在运行过程中发生意外故障。
这两个连接器在物理结构和功能上是完全相同的,主要用于执行器之间的菊链(Daisy Chain)连接。
在 TTL 或 RS-485 通信模式下,用户可以为每个执行器分配独立的 ID,从而实现对单个执行器分别控制,也可以对多个执行器进行统一控制。
在 PWM 信号模式下,用户可以同时控制多个执行器执行相同的运动,但无法对每个执行器进行不同动作的独立控制。
因此,两个接口的设计目的是为了方便多执行器串联连接,提高系统布线和扩展的灵活性。
一款经济型,由经济实惠的带芯直流电机驱动。仅配备26毫米行程。
通过内置限位开关实现简单的线性作,无需驱动电路和电位器。